Im Bike2CAV wurden erstmals drahtlose Kommunikationskanäle zwischen Fahrzeugen, Fahrrädern und der Infrastruktur unter realen Bedingungen validiert.
Zunächst wurden unterschiedliche Lösungsansätze analysiert, um geeignete und sichere Methoden auswählen zu können. Die vielversprechendsten Methoden werden dann in einem kontrollierten Experiment getestet und anschließend mittels einem Proof-of-Concept-Protypen jeweils in zwei Szenarien realerprobt.
Bei den Experimenten an den mit smarter Sensorik ausgestatteten Testkreuzungen Weiserstraße/Gabelsbergerstraße in der Stadt Salzburg und an der B158 in der Salzburger Gemeinde Koppl kamen ein vernetztes, automatisiertes Fahrzeug sowie ein neuartiges vernetztes Forschungsfahrrad zum Einsatz. Getestet wurde eine durchgängige Kette von unterschiedlichen Datenverarbeitungsmethoden von der Eigenlokalisierung und Detektion von Verkehrsteilnehmenden, über die Erkennung von Kollisionsrisiken und die Generierung und Aussendung von Warnmeldungen bis hin zur Kommunikation an Radfahrende sowie andere Verkehrsteilnehmende.
Um das System zu testen und Informationen darüber zu erhalten, wie die Warnsignale von den Testpersonen wahrgenommen werden, wurde jeweils drei Szenarien auf den zwei Kreuzung getestet. Pro Szenario wurden fünf Wiederholungen durchgeführt.
Kreuzung im städtischen Umfeld
Testkreuzung Weiserstraße/Gabelsbergerstraße

Getestete Szenarien im städtischen Umfeld
![]() CAV
CAV![]() Fahrrad
Fahrrad
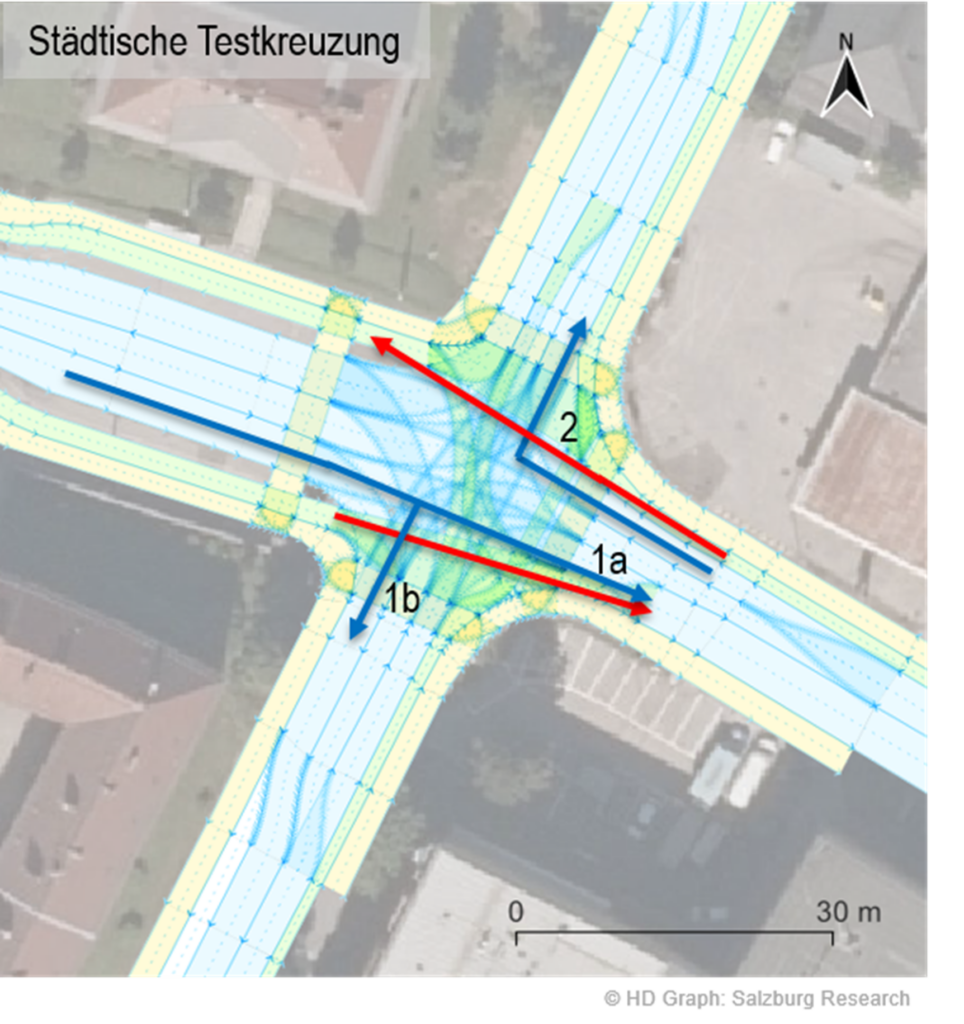
- Szenario 1a: CAV und Fahrrad kommen aus der gleichen Richtung, das Fahrrad fährt am vorhandenen Radweg, beide fahren gerade aus und überqueren die Kreuzung, Radweg und Fahrspur münden nach der Kreuzung in eine gemeinsame Fahrspur ein, dabei tritt eine verengte Platzsituation auf. Das Kollisionsrisiko (longitudinal collision risk) entsteht beim Zusammentreffen von Radweg und Fahrspur, wenn sich der Platz für Fahrspur und Radfahrstreifen verringert.
- Szenario 1b: CAV und Fahrrad kommen aus der gleichen Richtung, das Fahrrad fährt auf dem vorhandenen Radweg, das CAV biegt nach rechts ab, das Fahrrad fährt gerade aus über die Kreuzung drüber. Das Kollisionsrisiko (intersection collision risk) entsteht bei der Abbiegesituation, wenn CAV und Fahrrad aufeinandertreffen.
- Szenario 2: CAV und Fahrrad kommen aus der gleichen Richtung, das Fahrrad fährt auf dem vorhanden Fahrradstreifen, das Fahrrad fährt geradeaus über die Kreuzung drüber, das CAV biegt rechts ab. Das Kollisionsrisiko (intersection collision risk) entsteht bei der Abbiegesituation, wenn CAV und Fahrrad aufeinandertreffen.
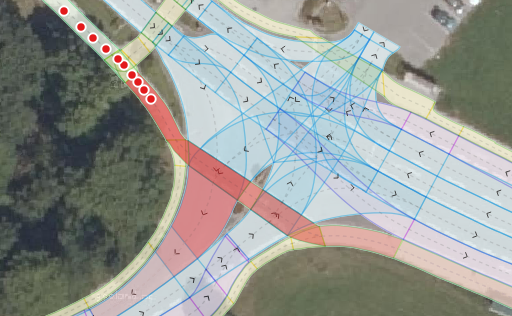
Darstellung der Testkreuzung in der Stadt Salzburg mittels einer HD-Map und im Foto sowie eine beispielhafte Trajektorie eines Fahrrads mit möglichen prognostizierten Fahrrouten.

Kreuzung im ländlichen Raum auf einer Freilandstraße
Testkreuzung an der B158 in der Salzburger Gemeinde Koppl

Getestete Szenarien im ländlichen Umfeld
![]() CAV
CAV![]() Fahrrad
Fahrrad
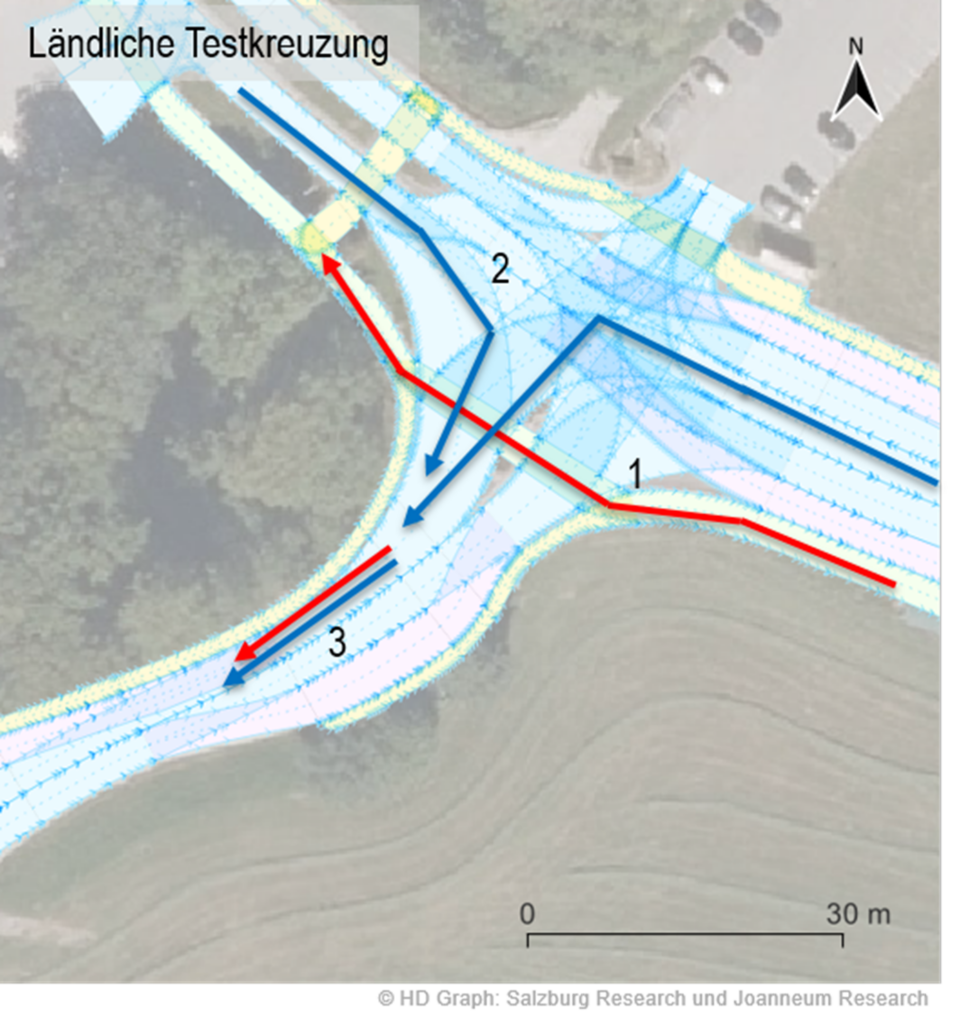
- Szenario 1: Das CAV fährt auf der Bundesstraße in Richtung Salzburg und biegt links in die Landesstraße ein, das Fahrrad fährt auf dem vorhandenen Radweg ebenso in Richtung Salzburg und quert auf der Radfahrerüberfahrt die Kreuzung. Das Kollisionsrisiko (intersection collision risk) entsteht bei der Abbiegesituation, wenn CAV und Fahrrad aufeinandertreffen.
- Szenario 2: Das CAV fährt auf der Bundesstraße in Richtung Bad Ischl und biegt in die Landesstraße rechts ein, das Fahrrad fährt auf dem vorhandenen Radweg in Richtung Salzburg und quert auf der Radfahrerüberfahrt die Kreuzung. Das Kollisionsrisiko (intersection collision risk) entsteht bei der Abbiegesituation, wenn CAV und Fahrrad aufeinandertreffen.
- Szenario 3: Fahrt auf einer Freilandstraße. Das CAV nähert sich von hinten dem Fahrrad und fährt am Fahrrad vorbei (überholt). Das Kollisionsrisiko (longitudinal collision risk) entsteht, wenn das CAV am Fahrrad vorbeifährt.
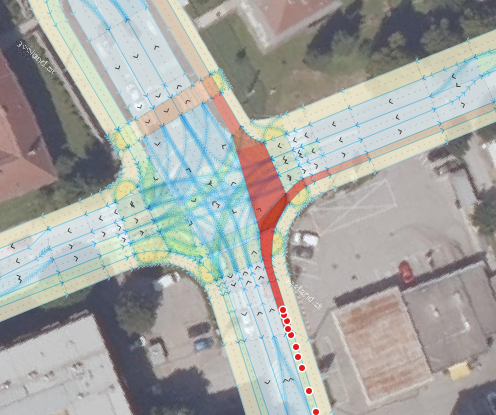
Darstellung der Testkreuzung im ländlichen Raum in der Gemeinde Koppl mittels einer HD-Map und im Foto sowie eine beispielhafte Trajektorie eines Fahrrads mit möglichen prognostizierten Fahrrouten.