Um diese Ziele zu erreichen, werden von den Projektpartner/-innen die folgenden Innovationen umgesetzt:
Zuverlässige Detektion von Kollisionsrisiken
AIT – Austrian Institute of Technology
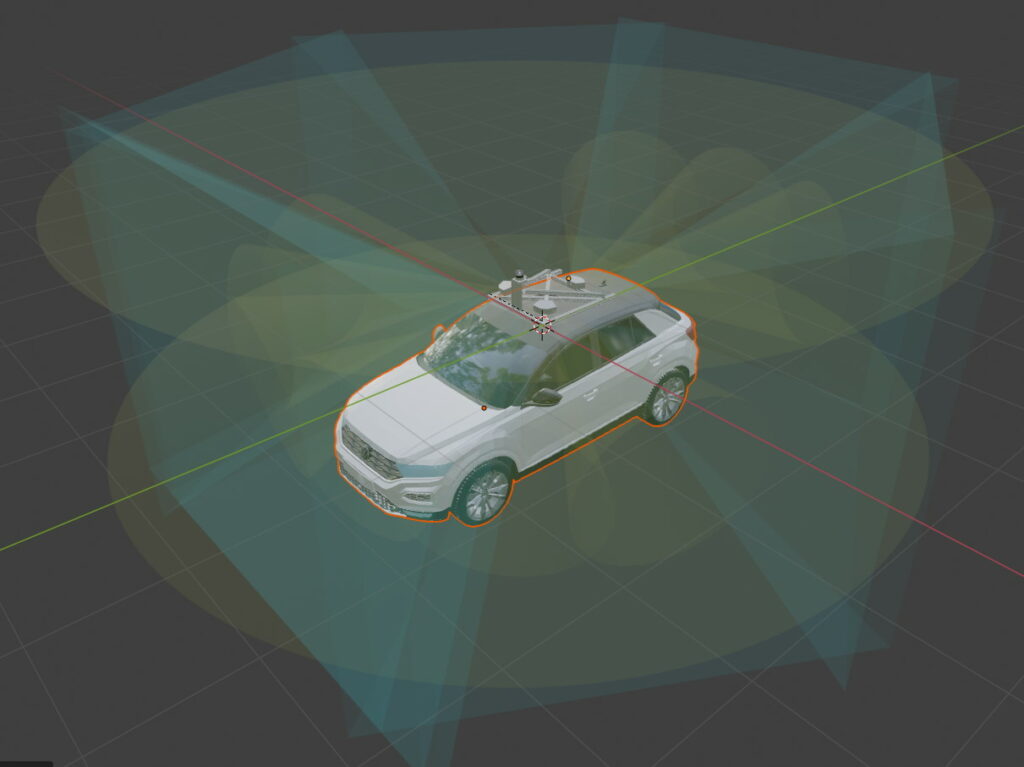
Das AIT realisiert eine Posen-spezifische 3D-Verfolgung von VRUs anhand der gemessenen VRU-Attribute (Pose, 3D Position relativ zum CAV), um die einzelnen, mit Unsicherheit behafteten Schätzungen zeitlich zu aggregieren und um dadurch Kollisionsrisiken zuverlässiger detektieren zu können.
Zudem wird eine bildbasierte Klassifizierung für die visuelle Erkennung einer Abbiege-Absicht entwickelt. Komplementär dazu soll ein Key-Punkt-Erkennungsansatz mit Skelettanpassung untersucht werden, um die Armhaltung zu erkennen, die auf eine beabsichtigte Abbiegung hinweist.
Hightech-Fahrrad für erhöhte Sicherheit im Straßenverkehr
Boréal Bikes
Boréal Bikes wird verschiedene neue Ansätze zur Verbesserung der Fahrradsicherheit der Radfahrer/-innen vorstellen. Das Fahrrad kann in V2X-Kommunikation integriert und über vernetzte Fahrzeuge in der Umgebung informiert werden. Das Fahrrad verfügt über ein Set von Sensoren, die Echtzeit-Telematik und Feedback von Benutzerinteraktionen liefern. Darüber hinaus kann das Fahrrad Edge-Computing für erweiterte Funktionen wie Computer Vision und semantische Punktwolkensegmentierung ausführen und ist außerdem mit der neuesten Lokalisierungstechnologie für eine präzise Positionierung ausgestattet.

Zusammenspiel von Videoanalyse und V2X-Kommunikation
Kapsch TrafficCom
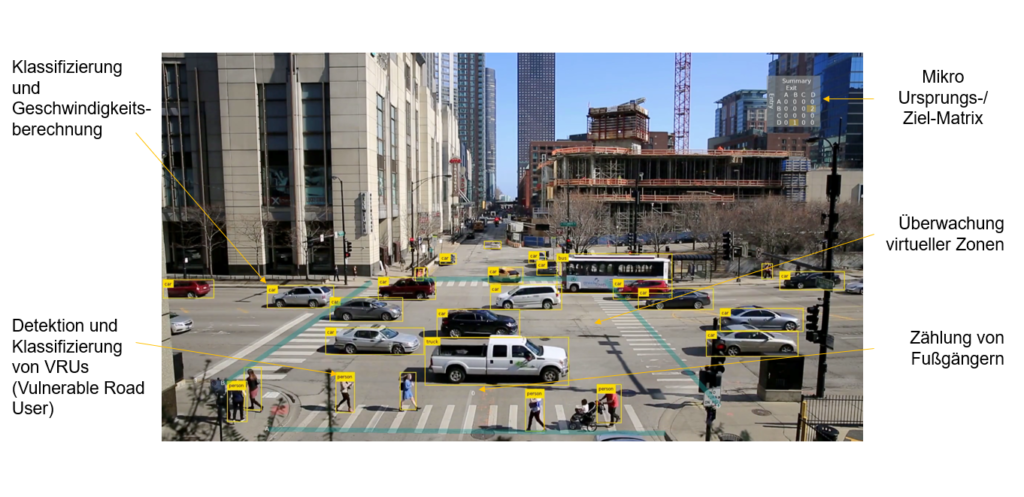
Während videobasierte Verkehrsanalyse kein neues Thema ist, ist es ein wichtiger Schritt in Richtung Zukunft, diese für die gezielte Auswertung von Fahrraddaten zu nutzen. Insbesondere das Zusammenspiel von Videoanalyse und
V2X-Kommunikation wird einen bisher nicht gekannten Situationsüberblick liefern. Für die Kommunikation werden neueste ITS-G5 Meldungsformate benutzt, welche derzeit noch in Entwicklung in der Standardisierung sind, wie die Übermittlung von Objekten auf der Straße (ETSI ITS-G5 CPM) oder die Verbesserung der Positionsgenauigkeit des Fahrzeuges (ETSI ITS-G5 RTCMEM). Vor allem die Erweiterung der V2X-Kommunikation von Day-1 Diensten, welche sich auf Kraftfahrzeuge fokussieren, auf vulnerable Verkehrsteilnehmer (wie in diesem Fall das Fahrrad) stellt einen neuen innovativen Sicherheitsaspekt dar.
HD-Maps zur hochgenauen Positionserfassung
Salzburg Research, Forschungslinie Mobility and Transport Analytics
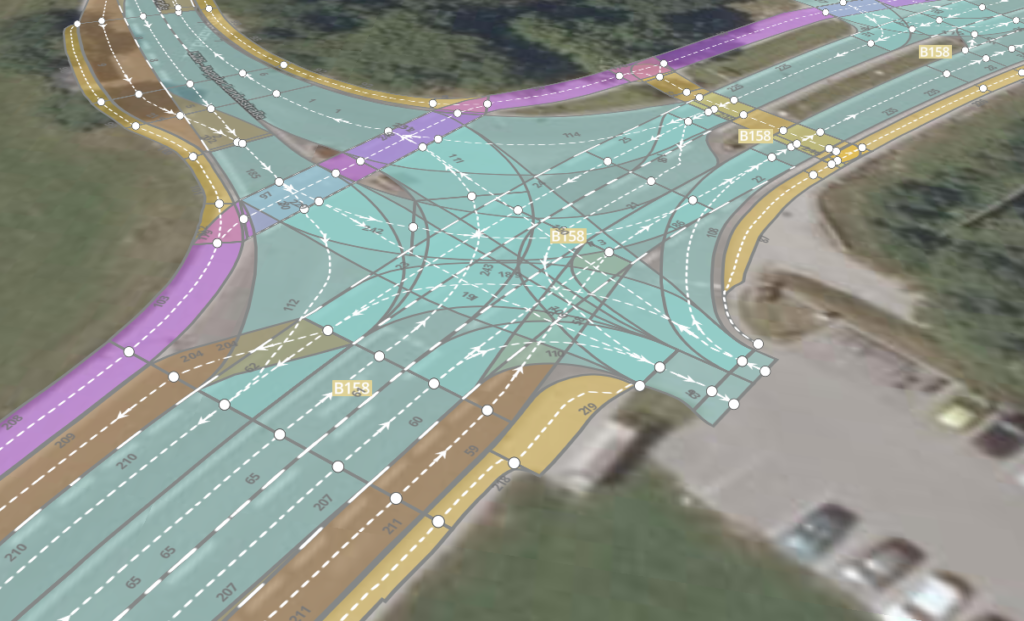
Die Forschungslinie Mobility & Transport Analytics untersucht Fragestellungen, in welcher Form hochpräzise Karten, sogenannte (HD-Maps), zur Analyse von Bewegungsabläufen von Radfahrer/-innen auf Verkehrsknoten eingesetzt werden können. Dafür wird die im Projekt Digibus® Austria erzeugte HD-Map in der Gemeinde Koppl um Verkehrsflächen bzw. Verkehrsregeln für den Radverkehr erweitert, zudem wird eine zweite HD-Map für eine Testkreuzung in der Stadt Salzburg erstellt.
Für die Erfassung von Bewegungsdaten von Radfahrer/-innen wird ein Prototyp für Fahrräder aufgebaut, mit dem nicht nur Fahrspuren hochpräzise erfasst sondern auch Handzeichen zur Richtungsanzeige in Echtzeit erkannt und an die anderen Verkehrsteilnehmer/-innen übermittelt werden können.
Stärkere Vernetzung der Radfahrer/-innen
Bike Citizens
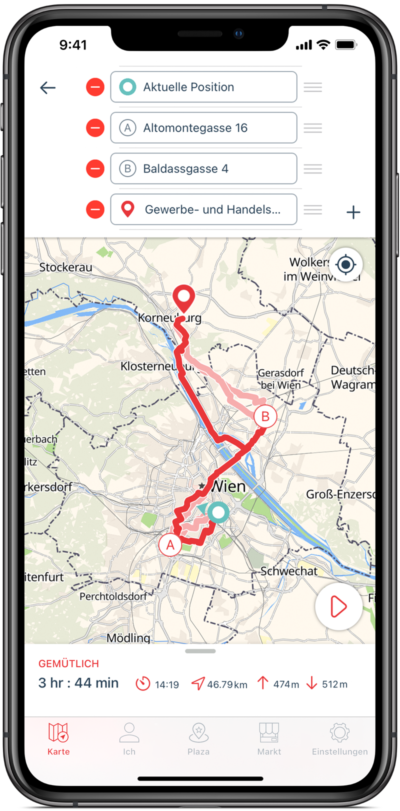
Aktuelle Verkehrstelematik-Systeme bieten keine gute Integration von Radfahrer/-innen. Im Rahmen des Forschungsprojektes soll die Rolle des Fahrrads als essentielles Verkehrsmittel – besonders im urbanen Bereich – unterstrichen werden. Auf diese Weise soll jedes Fahrrad künftig in der Lage sein, aktiv mit vernetzten Fahrzeugen und Road Side Units zu interagieren und den Radfahrenden Zusatzinformationen liefern, die sich aus Bord-Sensoren und aus von außen übermittelten Informationen speisen.
Höhere Sicherheit für Radfahrer/-innen durch Kenntnis der Kollisionsrisiken
KFV – Kuratorium für Verkehrssicherheit
Das KFV fokussiert sich im Projekt auf die Stärkung der Verkehrssicherheitsforschung in der Bewertung von Kollisionsrisiken von Radfahrer/-innen. Ungeschützte VerkehrsteilnehmerInnen sind im Straßenverkehr besonders gefährdet. Mit der Entwicklung von nicht-ablenkenden Warnkonzepten soll ein weiterer von vielen Ansätzen geschaffen werden, um dieser Gruppe eine sichere und gleichberechtigte Teilnahme am Straßenverkehr zu ermöglichen.
Zielgruppen-orientierte Entwicklung von Warnungen durch Co-Creation
Salzburg Research, Forschungslinie Innovation & Value Creation
Der enge Austausch und die Einbeziehung der Zielgruppe und Expert/innen in Form eines Co-Creation Ansatzes unterstützt die zielgruppenspezifische Entwicklung der potenziellen Warnsysteme und hat zum Ziel, die Akzeptanz der funktionalen Lösung und/oder daraus folgenden Produkte zu erhöhen. Die Anforderungen an das Warnsystem und die möglichen Interventionsmechanismen (haptisch, visuell, akustisch oder sensorisch) werden aus Sicht verschiedener Fahrstile (risikobereiter oder vorsichtigem Fahrstil) konzipiert. Das Warnsystem oder -information kann am Fahrrad, am Fahrzeug, in der Infrastruktur oder an den Radfahrer/innen selbst integriert werden. Ein spezieller Fokus wird auf den Einsatz und Nutzen von smarten Textilien (z.B. Radhandschuh mit integrierten Sensoren) oder Materialien (Sitzbezug oder Rucksack) gelegt.

Räumliche Modelle zur Definition von Gefahrenbereichen
Universität Salzburg, Fachbereich Geoinformatik
Die Entwicklung von räumlichen Modellen für die Abgrenzung von Gefahrenbereichen setzt Ergebnisse aus der Verkehrssicherheitsforschung in einen räumlichen Kontext. Damit wird unter anderem die Verbindung zu weiteren Umgebungsvariablen ermöglicht. Zudem können die Risikomodelle über den räumlichen Bezug in die Kommunikation vernetzter Fahrzeuge eingebunden werden. Durch den Rückgriff auf standardisierte Datenmodelle (Lanelet2) wird die Brücke zwischen Unfalldatenanalyse, räumlicher Risikomodellierung und autonomem bzw. vernetztem Fahren geschlagen.
Prototyp zur Berechnung von Kollisionsrisiken
Salzburg Research, Forschungslinie Mobility and Transport Analytics
Im Projekt wird ein Prototyp entwickelt, der in nahezu Echtzeit potentielle Kollisionsrisiken zwischen Verkehrsteilnehmer/-innen an einem Knotenpunkt (Kreuzung) berechnet. Bewegungen von Verkehrsteilnehmern werden als Datenströme in ein System integriert und mittels eines Map-Matching-Verfahrens mit einem hochgenauen Straßennetz (HD-Map) verschnitten. Auf Basis dieser Daten wird für alle Verkehrsteilnehmer/-innen eine Vorhersage über deren zukünftige Bewegung (Trajektorie) erstellt. Durch das räumliche und zeitliche Verschneiden der vorhergesagten Trajektorien der einzelnen Verkehrsteilnehmer werden potentielle Kollisionsrisiken am Knotenpunkt ermittelt. Erkannte Kollisionsrisiken werden über Schnittstellen für die Verkehrsteilnehmer (z.B. via C-ITS Nachrichten) zur Verfügung gestellt.